Tamiya High-Power Gearbox Kit
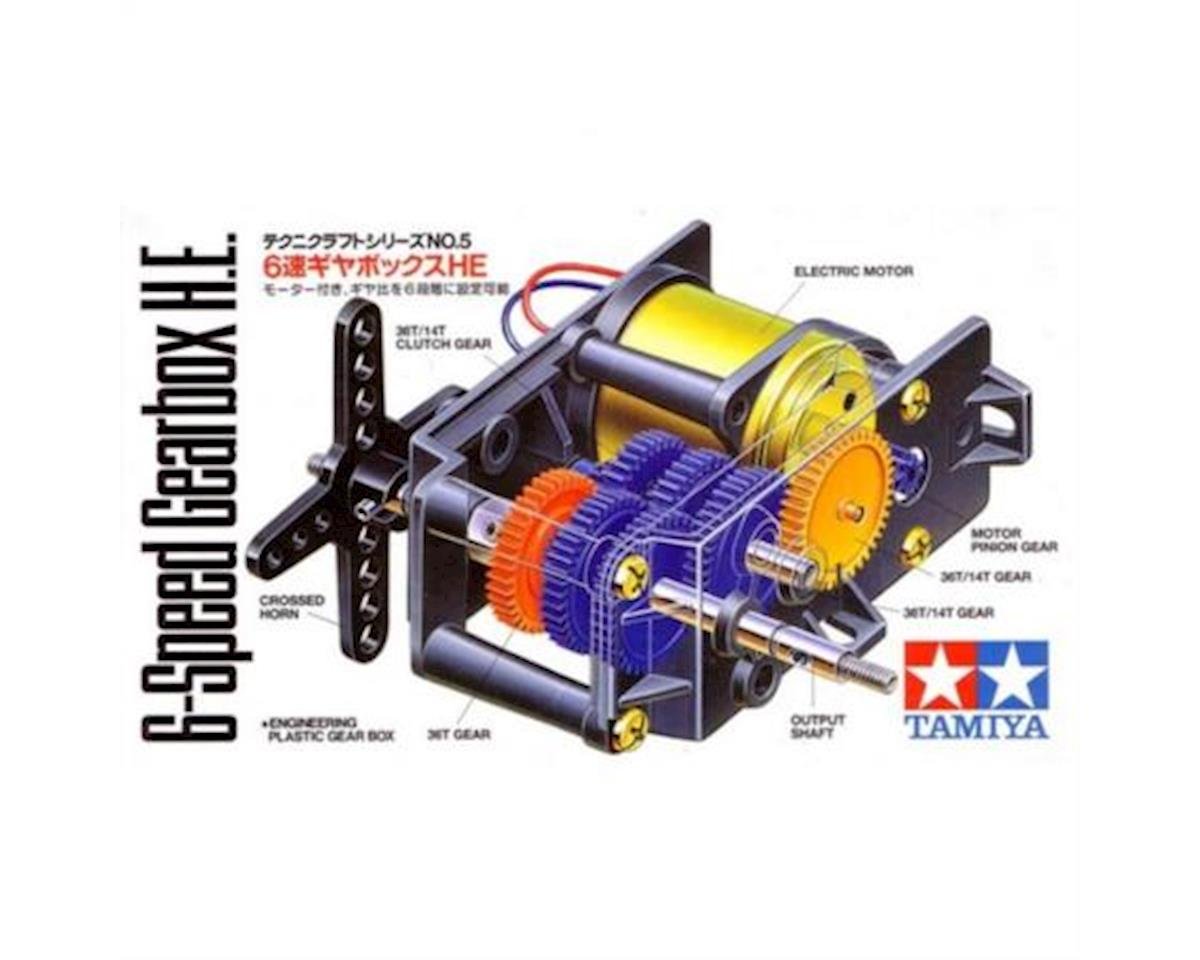
TAM72003
Back Order Now
$2.99 flat rate shipping!
Learn More
This item earns up to 16 VIP Reward Points
Learn More
FREE U.S. Shipping on orders of $99 or more*. See complete details >
This product was added to our catalog on July 29, 2020